Hi, here is the update since last time! Among other things:
– We polished the main characters with improvements to the 3D models, inverse kinematics for the feet, cloth simulation, better collision detection, etc.. That kind of polish seemed very important since the player is looking at the main character all the time. We also fixed issues with the character rig we were using.
– I cleaned up and improved the way shaders are implemented in the game, so that it is very easy to create new textures (ex: as grass, sand, rocks…). I improved and added new types of procedural textures. One example is Gabor noise, which is great for anisotropic patterns.
During development I often programmed specific systems because I had no idea that it was possible to do much better. For example, I had specific systems for drawing specific types of object (cubic-shaped rocks, buildings, vegetation…) which all got replaced by only two or three systems (ex: tetrahedral meshes). So now I worked everything around them, and simplified the code, which allowed complexity to be put elsewhere where it is more needed.
– Similarly, I finalized the sound code, since at this point it is clear what we actually needed. For example: all sounds now change in a similar way based on what should be heard across the 4th dimension.
– We finished all the large building scenes except one, and put them in the game with the final (PBR) lighting and they really look super great!
The game looks much more refined and polished compared to what we have shown so far. Some changes also make it much more immersive. I love our concept art by Kellan Jett; it is really original and gives the world a truly unique feel. We worked hard to bring it to life in 3D (well, actually 4D ahah) and do it justice. The fact that the game gives the sense of a world, and not just a series a puzzles in an abstract place is very exciting to me.
– For a fun few days break I also quickly cleaned up a mechanic that I wasn’t sure was going to be in the game, and made the few puzzles for it. The game is going to be very rich and dense!
– We also did the final polish on many “one-off things” in the game (I shall remain vague about this for now ahah).
Generally I have now done a final polish pass on almost every part of the game, and now basically the only thing left, for realsies, is we need to go through most levels and give them a final look, by placing (and sometimes making) props, and creating specific types of 4D objects/textures! (As I said before, all the puzzle design has been done for a long time). So this is a pretty exciting time!
As always, thank you for your patience and enthusiasm.
It’s very exciting for work from a game (and a first for an indie game) to be presented in the SIGGRAPH Technical Papers program! Thank you all for your patience during development of the game, as you can see it can get pretty involved, ahah!
When enabled, the edges of objects are projected onto the current slice.
That means that no matter where the slice is, the edges of the objects will always be visible.
It’s an “old school” way of displaying 4D objects which you may have seen before!
Try it in the 2D Levels!
I had fun going back to every level to check it out. It lets you see the movement of the objects even if you are not in the same slice.
As with the previous update, there is a new page at the right-most end of the level select hub. After you play the relevant level there the button will be unlocked.
The 2D/3D version gives an idea of what exactly these lines are showing:
Note: for simplicity each 4D toys update is now called 1.x, where x is the number of the update.
I started working with a new artist to *really* nail down the final look of the game and environments across the whole game in a more integrated way. In the process we finally fully switched the engine to Physically Based Rendering (It was an easy switch, actually, contrary to what could be expected!)… and it makes the game look even better.
These were my thoughts as we nailed down the look of the game, and about how 4D space constrains our art direction in Miegakure:
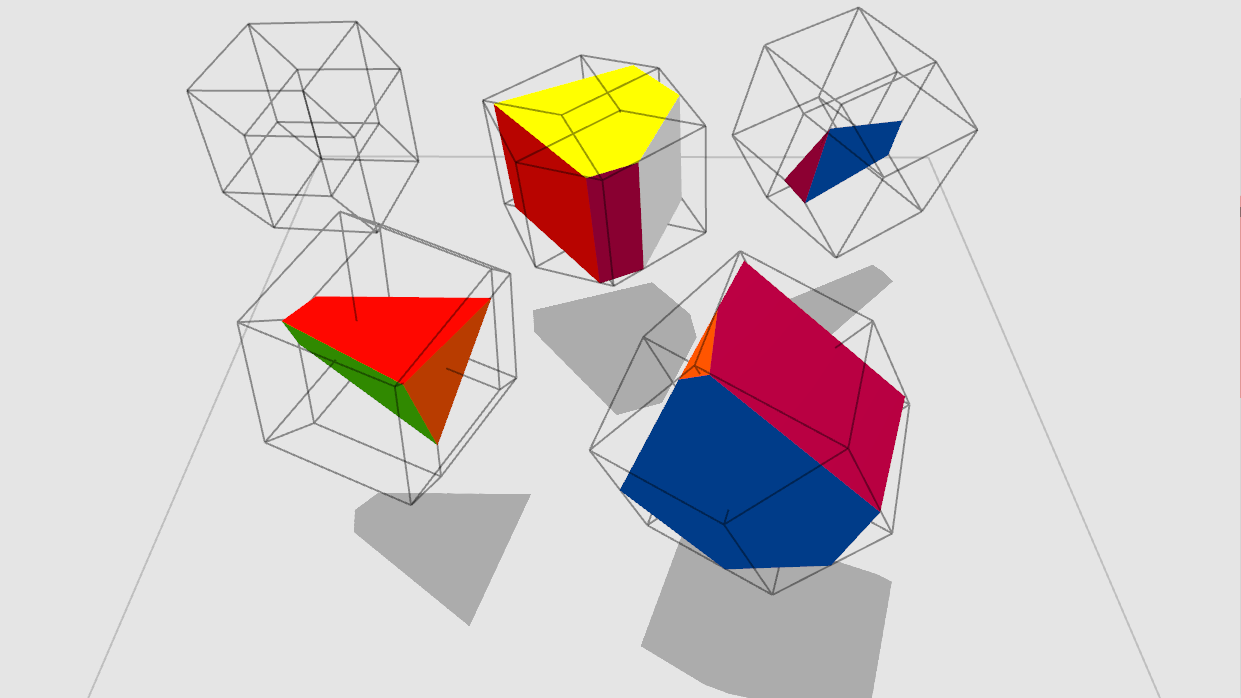
In Miegakure we procedurally generate many 4D meshes and 3D textures. Just like 3D objects have a surface that is 2D, 4D objects have a surface that is 3D! The game also has many regular 3D meshes (with 2D textures) which are embedded in the 4D world, by giving them 4D thickness.
At first it might seem difficult to generate procedural 3D textures which are as detailed as 2D ones made by hand. And we need both at the same time!
In order to have details that aren’t noisy during transition, for a while I was using a combination of a 2D texture and a 3D texture, where the 2D texture contained more detail but was not affected by the slicing, and was just projected onto the sliced object’s surface. This was a hack, which you can see in the trailers: the high frequency detail of the texture just either slides or streches.
However too much 3D texture detail looks bad during the “transition” anyway. (The transition is what I call the time when the slice rotates 90 degrees after you press the 4D rotate button.) If the slice goes through many tiny objects as it rotates, the time each tiny object will be visible will be very short. This would look like many appearing/disappearing objects. The smaller the objects, the quicker they will be appearing/disappearing. In this video of an MRI of a fruit, the tiny seeds look noisier than the larger overall shape as the slice changes (but the colors are all grayscale and the size is still fairly big so it doesn’t look bad). So if a 3D texture has too much small detail, even if it looks good as a static 2D slice, it will look very noisy during the transition. So actually we don’t want to generate too much 3D texture detail, even if we can!
By the way there is a noise issue in 3D too: when the 3D camera moves over quickly changing detail it can create aliasing (a “shimmering” effect). Much of our 3D handmade content (large buildings, trees…) was already made to be less noisy in that sense. Stylized games have an easier time avoiding this problem since they often contain large flat regions of color.
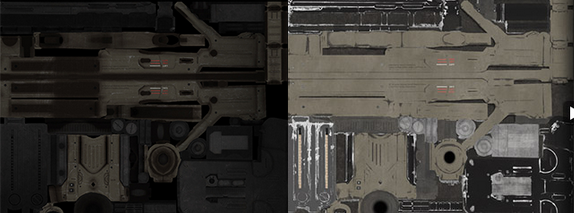
Also, note that we can replace texture detail by geometric detail. This is part of what happened in the games industry with the transition to Physically-Based Rendering. Textures in PBR are not supposed to contain lighting/shadow information, only material information. For example, a rock texture might just be a simple gray color, and if we want actual cracks in the stone we model them as geometry (or normal maps) instead of dark lines in the texture. One of the goals of PBR is to make sure that the props will look good under many lighting conditions: for example a texture where the dark shadows are already stored in the texture (as opposed to computed using the light source) makes it harder to do that. Here is an example comparison/explanation.
Traditional and PBR textures
So it is in some sense more correct to use geometric detail instead of texture detail anyway. And most of the time it is simpler to procedurally generate geometry, so!
Miegakure can display more 4D geometric detail now compared to when development started. But there is obviously a similar limit for geometric detail where too much looks noisy.
So we can’t have too much texture/geometry detail, but on the other hand I don’t want the game to have very large flat section of colors like so many games have these days. I think it doesn’t work very well with the dioramas seen from far away, where all the visuals are condensed in a small section of the screen. I think it’s fine for the visuals to be simple if they fill a large area like the entire screen, but if they don’t then it does not give enough interesting stuff to look at.
The slicing mechanic also forces upon the game a certain level of realism. For example the tree canopies need to look good when sliced. We could model the canopy with a small number of large flat planes to give a nice painterly/low-noise vibe. This looks good in a regular game, but not when sliced, because the inner structure of the planes is revealed. It just looks like a bunch of simple intersecting planes instead of many tiny leaves creating a canopy. So we need to model leaves more realistically, but we can always make them mostly the same color to reduce noise, as shown here:
So to summarize: we want detail (enough to look good when sliced, and in dioramas, etc…), but not so much that it looks noisy (in the 3D and 4D sense). Compared to texture detail, geometric detail is easier to make and more correct (in the PBR sense and in how it doesn’t require 4D hacks). The final result is a combination of these constraints. It looks much more polished than before. I can’t wait to show it!