It’s very exciting for work from a game (and a first for an indie game) to be presented in the SIGGRAPH Technical Papers program! Thank you all for your patience during development of the game, as you can see it can get pretty involved, ahah!
Archive for the ‘4D Toys’ Category
SIGGRAPH 2020 talk for my technical paper: N-Dimensional Rigid Body Dynamics
Tuesday, January 5th, 20214D Toys Version 1.6: Wireframe Projections
Tuesday, December 15th, 2020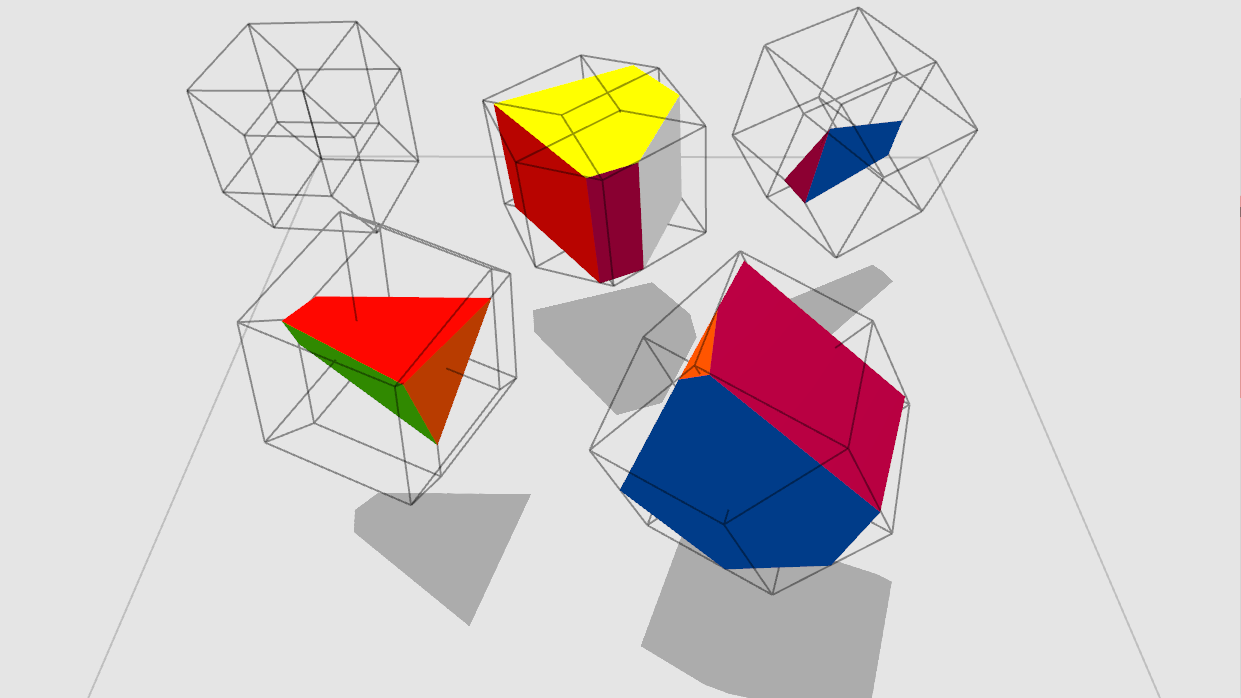
4D Toys Update (iOS) (Steam VR + Mouse & Keyboard).
New button: Wireframe Projections.
When enabled, the edges of objects are projected onto the current slice.
That means that no matter where the slice is, the edges of the objects will always be visible.
It’s an “old school” way of displaying 4D objects which you may have seen before!
Try it in the 2D Levels!
I had fun going back to every level to check it out. It lets you see the movement of the objects even if you are not in the same slice.
As with the previous update, there is a new page at the right-most end of the level select hub. After you play the relevant level there the button will be unlocked.
The 2D/3D version gives an idea of what exactly these lines are showing:
Note: for simplicity each 4D toys update is now called 1.x, where x is the number of the update.
4D Toys Version 1.5: Anti-Gravity, Export Mesh for 3D Printing, 4D Accelerometer
Wednesday, August 19th, 2020
Here is another 4D Toys Update (iOS) (Steam VR + Mouse & Keyboard).
It adds three buttons:
- Export Mesh: Exports a 3D mesh of what is currently visible on screen.
These meshes can then be 3D printed, etc… (Unfortunately 4D printing is not yet available in this universe :P).
Find the meshes in your Documents folder. (On iOS you can access it by connecting your iDevice to your computer and using Finder).
Note that Shapeways’ algorithm for filling the inside of meshes sadly fails on some of the coolest meshes like the Star Polychora from the last update, since they are filled with lots of polygons on the inside (btw it’s fun to poke your head inside these meshes in VR!).
- Anti-Gravity: Creates an anti-gravity field that makes objects float. Besides the obvious coolness, this allows to see rotations that are unrestricted from the constraints of the collision with the ground.
- 4D Accelerometer (iOS only): Swaps the forward/backward direction of the accelerometer with the 4th dimension.
That is, tilting your device toward/away from you will result in a force along the 4th dimension instead.
A new page of shapes has been added, with one new level for each button. Visiting each of these levels unlocks the corresponding buttons. Also, all special buttons are now gathered into a new menu button. This lays the groundwork for easily adding new features in future updates!
Btw, the SIGGRAPH conference started and my talk on nD Rigid Body Dynamics is now online (I will post it publicly in a few weeks). The Q&A session is on Wed Aug 26 at 9:00AM PDT!
SIGGRAPH 2020 Technical Paper: N-Dimensional Rigid Body Dynamics
Thursday, May 7th, 2020Excited to announce that my technical paper “N-Dimensional Rigid Body Dynamics” was accepted to SIGGRAPH 2020! Very proud to present research developed for 4D Toys & Miegakure at such a prestigious conference.
Here is the link to the paper and the abstract:
I present a formulation for Rigid Body Dynamics that is independent of the dimension of the space. I describe the state and equations of motion of rigid bodies using geometric algebra. Using collision detection algorithms extended to nD I resolve collisions and contact between bodies. My implementation is 4D, but the techniques described here apply to any number of dimensions. I display these four-dimensional rigid bodies by taking a three-dimensional slice through them. I allow the user to manipulate these bodies in real-time.
Btw I believe it is basically unheard of to have work from an indie game presented in the SIGGRAPH technical papers track?
The paper is full of really fun and beautiful math (obviously Geometric Algebra based, see my recent article) that makes me happy. One reviewer called the work “whimsical,” and they’re not wrong, ahah.
Most of this work (including writing the paper) is from ~2012, but I added a section on the (4D) Dzhanibekov effect at the suggestion of the reviewers. Many thanks to them for helping me greatly improve the paper.